Cómo mejorar la precisión y la calidad de Lidar - Global Mapper
Escrito por: Emily Hunt y David McKittrick (Adaptación de Engesat)
Al igual que con cualquier insumo ou materia prima, la calidad de los datos de nubes de puntos, como el lidar, afecta directamente la calidad de sus productos derivados. Una nube de puntos con una precisión posicional inferior al estándar requerido producirá un Modelo Digital de Terreno (MDT) inexacto; los puntos mal clasificados darán lugar a una representación errónea de cualquier elemento vectorial extraído; y los puntos de ruido que se encuentren por encima o por debajo del rango de elevación esperado probablemente corromperán cualquier análisis posterior o flujo de trabajo de procesamiento de datos.
Global Mapper Pro® ofrece una gran variedad de herramientas para editar, filtrar y, en general, mejorar la calidad de los datos de nubes de puntos. La nube de puntos actualizada puede utilizarse posteriormente en la amplia gama de herramientas de análisis de Pro, o puede exportarse para crear una versión mejorada de los datos lidar como producto final.
Filtrado durante la importación
Cualquier persona que importe datos de nubes de puntos en Global Mapper notará que, al cargar un archivo, se presentan inmediatamente varias opciones para especificar qué puntos se desea incluir. Estas opciones permiten cargar solo los puntos dentro de límites seleccionados, lo que permite a los usuarios recortar los puntos importados y reducir el tiempo de carga y procesamiento.
Si bien este filtrado integrado puede resultar conveniente, a menudo lo más recomendable es comenzar examinando el conjunto de datos en su totalidad. Una revisión rápida de la distribución de puntos, las clasificaciones y las características generales tras la importación suele proporcionar el contexto necesario para decidir qué filtros ofrecerán los resultados más fiables.

Acceso a los metadatos
A menudo, el primer paso para evaluar un conjunto de datos es simplemente observarlo. ¿Cubre la nube de puntos totalmente su área de interés o existen vacíos? Al visualizarla en el Visor 3D, ¿resaltan picos verticales o zonas hundidas?
Más allá de esa comprobación visual, un paso de control de calidad (QC) más deliberado comienza con los metadatos de la capa, disponibles al hacer clic derecho sobre la capa en el Centro de Control. Aquí, Global Mapper presenta detalles clave que incluyen el rango de elevación, la densidad y el espaciado promedio de los puntos, la fecha de recolección y las clasificaciones de puntos existentes. Esta instantánea ofrece una imagen inmediata de cómo se capturaron los datos y qué contienen.
Con ese contexto en mano, puede pasar a pasos de mejora específicos para corregir vacíos, refinar las clasificaciones y fortalecer la fiabilidad general de la nube de puntos.
El proceso de mejorar la precisión y calidad de los datos lidar se divide en dos categorías generales: edición y filtrado. La edición suele implicar la actualización de las características de los puntos, mientras que el filtrado consiste en la eliminación de los puntos que no son necesarios o que se consideran erróneos. A menudo, estos dos procedimientos se aplican en conjunto.
Edición de nubes de puntos
Uno de los pasos más comunes al trabajar con datos de nubes de puntos es la asignación o actualización de los valores de clasificación para representar el tipo de superficie. Las clases comunes incluyen suelo, edificaciones y vegetación, entre muchas otras. En algunos conjuntos de datos, particularmente aquellos generados mediante fotogrametría, todos los puntos suelen comenzar como "no clasificados" (unclassified), lo que hace necesario aplicar clases significativas antes de que se pueda llevar a cabo cualquier análisis estructurado.
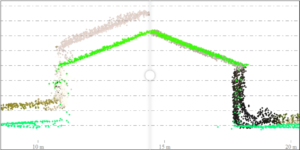
Clasificación manual
En Global Mapper Pro, las clasificaciones pueden actualizarse manualmente seleccionando los puntos a modificar y aplicando la clase deseada mediante los botones de clasificación preconfigurados en la barra de herramientas. Aunque este método no es eficiente para una reclasificación a gran escala, es ideal para retoques o ediciones rápidas de grupos pequeños de puntos, especialmente cuando se trabaja en la vista de Perfil de Ruta (Path Profile o vista de sección transversal).

Clasificación automática
Un flujo de trabajo más eficiente consiste en aprovechar las herramientas de clasificación automática, que analizan los datos lidar mediante algoritmos para detectar puntos que representan el suelo, vegetación alta o árboles, edificaciones, cables de servicios públicos aéreos y postes de energía. Otros objetos pueden aislarse para una clasificación manual mediante la herramienta de Segmentación (Segmentation tool). Estos puntos reclasificados pueden utilizarse posteriormente para la creación de un MDT o para la extracción de elementos. Una vez que una nube de puntos ha sido clasificada, es fácil realizar análisis adicionales, como la creación de una cuadrícula de elevación (grid) o la extracción de árboles como elementos vectoriales.
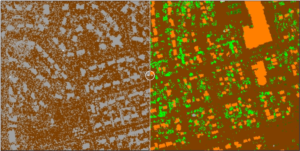
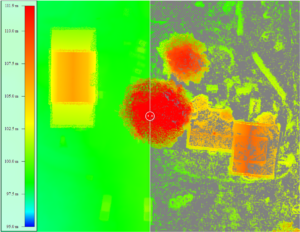
El conjunto de herramientas de Clasificación Automática analiza las nubes de puntos para identificar elementos como el suelo, la vegetación, las edificaciones, las líneas de servicios públicos aéreas y los postes de energía. Se pueden aislar objetos adicionales para su revisión manual mediante la herramienta de Segmentación. Una vez reclasificados, estos puntos pueden servir de base para tareas posteriores (downstream tasks), como la construcción de un modelo de superficie o la extracción de activos, como árboles, en capas de elementos.

Los puntos que representan edificaciones y árboles se identifican y reclasifican automáticamente
Clasificación personalizada
Más allá de los modelos integrados, la herramienta de Clasificación Personalizada de Nubes de Puntos permite a los usuarios definir sus propias clases y entrenar a Global Mapper Pro para reconocerlas. Una vez que los usuarios proporcionan puntos de muestra que representan un elemento consistente, el software analiza sus atributos y geometría para generar una firma de clasificación. Esta firma se convierte en la base para un modelo personalizado entrenado por el usuario.
Edición de los valores X, Y y Z
Otro aspecto de la calidad del lidar que puede perfeccionarse es la precisión posicional. Cuando un conjunto de datos no se alinea perfectamente con una capa de referencia o con otra nube de puntos, Global Mapper Pro ofrece diversas herramientas para corregir su posición 3D:
Cada uno de estos métodos actualiza las coordenadas o elevaciones de los puntos para reflejar las correcciones aplicadas. Para obtener orientación adicional sobre cómo mejorar la precisión posicional de las nubes de puntos, consulte este artículo.

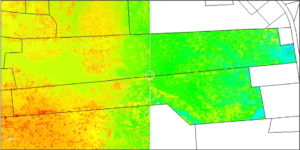
Una nube de puntos generada mediante fotogrametría se ajusta posicionalmente mediante la herramienta Fit Lidar para alinearse con una capa lidar existente
Filtrado de datos de nubes de puntos
Casi sin excepción, una nube de puntos deberá ser filtrada antes de comenzar cualquier flujo de trabajo de análisis, generación de superficies o extracción de elementos. El proceso de filtrado puede basarse en la extensión geográfica de los datos o, más comúnmente, en sus atributos o características inherentes.
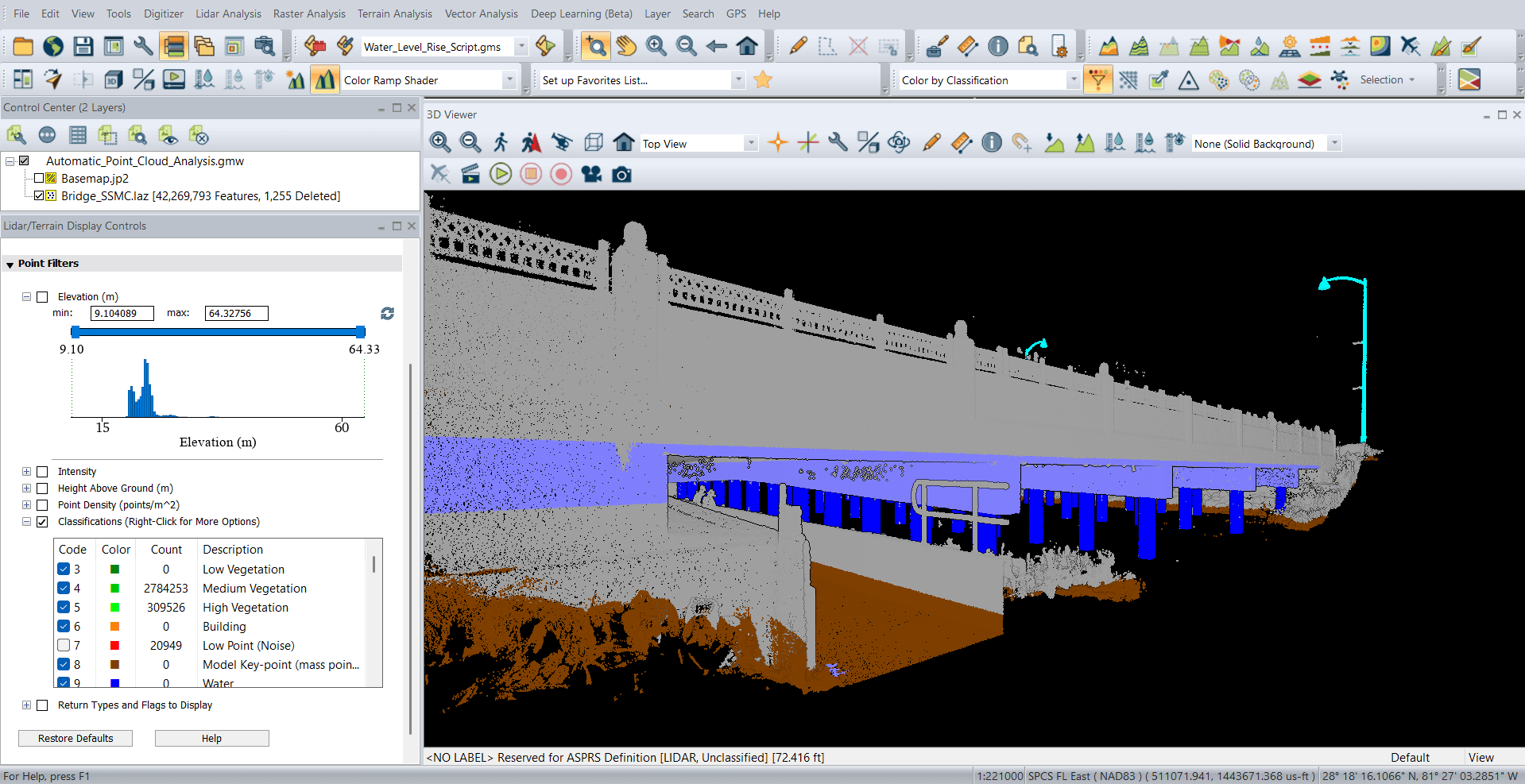
Herramienta de visualización Lidar
Dentro de los controles de visualización de Lidar/Terreno, recientemente renovados en la versión v26.2, se encuentra la interfaz de Filtros de Puntos (Point Filters), que permite visualizar de forma rápida y sencilla los puntos que cumplen con criterios específicos, ya sea que la nube de puntos sea lidar o fotogramétrica.
Los atributos filtrables se calculan y completan automáticamente en función de los metadatos de los puntos, superando las limitaciones de los atributos integrados estándar, como la elevación, la intensidad o los valores RGB. Mediante el uso de controles deslizantes de histograma, los usuarios pueden ajustar rápidamente qué puntos son visibles en tiempo real, lo que les otorga un control preciso sobre su conjunto de datos. Los puntos filtrados se ocultan de la vista pero no se eliminan, y pueden restaurarse en cualquier momento.

Filtrado geográfico
Al igual que con cualquier dato vectorial, una nube de puntos puede recortarse (cropped) según la extensión de un polígono preseleccionado, lo que proporciona un método sencillo para eliminar la redundancia en cualquier proceso posterior. Esta es, quizás, la más útil de las opciones de filtrado disponibles durante el proceso de importación de datos, pero también puede aplicarse después de que los datos hayan sido cargados.

Las nubes de puntos pueden filtrarse o recortarse fácilmente según la extensión del área de un proyecto
La proximidad entre puntos también puede utilizarse como base para el filtrado. La herramienta de adelgazamiento (thinning tool) de Global Mapper Pro elimina puntos basándose en un requisito de densidad o espaciado definido, conservando únicamente el punto con la elevación máxima, mínima o promedio dentro del entorno inmediato. Esto resulta especialmente útil cuando se trabaja con nubes de puntos de alta densidad creadas mediante fotogrametría.
De manera similar, la herramienta Model Key Point también adelgaza una nube de puntos, pero funciona para diezmarla hasta la cantidad mínima de puntos necesaria para representar los elementos en los datos.

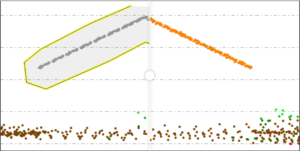
Eliminación de ruido
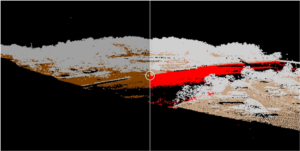
Los puntos de ruido se definen como aquellos que caen fuera del rango de elevación normal dentro de un área local específica. Los puntos de ruido pueden estar presentes debido a problemas en el proceso de recolección de datos, anomalías físicas en el área objetivo —como aves que vuelan por debajo de la aeronave— o por muchas otras razones. La herramienta de identificación de ruido de Global Mapper Pro puede reclasificar los puntos de ruido, o bien eliminarlos o borrarlos inmediatamente, basándose en un conjunto prescrito de parámetros y umbrales de elevación.

Filtrado por clasificación
El primer paso en el proceso de transformar una nube de puntos en un DTM ráster es, por necesidad, la eliminación de los puntos que no están clasificados como suelo. Conservar puntos que no son del suelo o puntos no clasificados creará una superficie que incluya elementos por encima del terreno y no reflejará la morfología del suelo desnudo (bare-earth) del área objetivo.
El filtrado en este contexto es un proceso sencillo de selección de clases, que puede aplicarse tanto a la visualización de los puntos en pantalla como durante el proceso de creación de la cuadrícula (gridding) o de la superficie. En cualquier caso, las elevaciones asignadas a los píxeles en la capa ráster resultante se derivarán del subconjunto seleccionado de la nube de puntos.

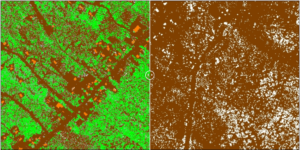
Puntos que no son del suelo eliminados antes de la creación de un Modelo Digital de Terreno.
Exportación de nubes de puntos
Aunque Global Mapper Pro ofrece una amplia gama de herramientas de edición y filtrado, es importante señalar que los procedimientos de mejora descritos en este artículo no se guardan automáticamente en los archivos originales ni en las capas cargadas. Para guardar los resultados de cualquier procedimiento de mejora de la nube de puntos en un archivo, los datos deben exportarse en el formato de nube de puntos adecuado. La nueva capa heredará todas las características de los puntos modificados y se limitará a aquellos puntos que se hayan conservado tras filtrar o eliminar los puntos que no son necesarios.
Es comprensible que las potentes herramientas de análisis, extracción y generación de superficies de Global Mapper Pro capten la mayor parte de la atención y los elogios de los profesionales geoespaciales. Sin embargo, es fundamental reconocer adicionalmente el papel vital que desempeñan las herramientas de edición y filtrado de la versión Pro en estos procedimientos. Cuanto mejor sea la calidad de la materia prima, mejor será el producto final.
Fuente: https://www.bluemarblegeo.com/blog/improving-the-quality-of-lidar-data-in-global-mapper/
Contato
Entre em contato conosco para receber uma proposta técnica e comercial adaptada às suas necessidades.
Atendimento em toda a América Latina!
E-mail: laurent.engesat@gmail.com ou engesat@engesat.com.br
Cel: 041 9134 0990 (também whatsapp)

¿Y tú, te gustó esta publicación? Deja un comentario para agregar contenido o para que iniciemos una discusión sobre el tema.
¡Dale like y comparte con tus clientes y colegas de profesión!
Esta publicación fue escrita por Laurent Martin, licenciado en Agronomía y con un Máster en Teledetección Aplicada en el Reino Unido, quien es responsable de la dirección de EngeSat.