Como Melhorar a Precisão e a Qualidade do Lidar - Global Mapper
Escrito por: Emily Hunt & David McKittrick (Adaptação Engesat)
Como ocorre com qualquer mercadoria ou matéria-prima, a qualidade dos dados de nuvem de pontos, como o Lidar, afeta diretamente a qualidade de seus produtos derivados. Uma nuvem de pontos com exatidão posicional abaixo do padrão exigido produzirá um Modelo Digital de Terreno (MDT) impreciso; pontos mal classificados resultarão em uma representação incorreta de quaisquer feições vetoriais extraídas; e pontos de ruído, situados acima ou abaixo da faixa de elevação esperada, provavelmente corromperão qualquer análise subsequente ou fluxo de processamento de dados.
O Global Mapper Pro® oferece uma vasta gama de ferramentas para edição, filtragem e melhoria geral da qualidade dos dados de nuvem de pontos. A nuvem de pontos atualizada pode, posteriormente, ser utilizada no extenso leque de ferramentas de análise do Pro, ou exportada para criar uma versão aprimorada dos dados Lidar como um produto final de entrega.
Filtragem Durante a Importação
Qualquer pessoa que importe dados de nuvem de pontos para o Global Mapper perceberá que o carregamento de um arquivo apresenta imediatamente diversas opções para especificar quais pontos serão inseridos. As opções incluem carregar apenas pontos dentro de limites selecionados, permitindo que os usuários recortem os pontos importados e reduzam o tempo de carregamento e processamento. Embora essa filtragem integrada possa ser conveniente, geralmente é recomendável começar examinando o conjunto de dados como um todo. Uma revisão rápida da distribuição dos pontos, classificações e características gerais após a importação costuma fornecer o contexto necessário para decidir quais filtros entregarão os resultados mais confiáveis.

A caixa de diálogo de importação de Lidar oferece inúmeras opções para a filtragem dos dados antes que eles sejam renderizados na visualização do mapa.
Acessando Metadados
Muitas vezes, a primeira etapa para avaliar um conjunto de dados é simplesmente observá-lo. A nuvem de pontos cobre totalmente sua área de interesse ou existem lacunas? Quando visualizada no Visualizador 3D, aparecem "picos" verticais ou áreas de rebaixamento discrepantes?
Além dessa verificação visual, uma etapa de Controle de Qualidade (QC) mais criteriosa começa com os metadados da camada, disponíveis ao clicar com o botão direito na camada no Centro de Controle (Control Center). Aqui, o Global Mapper apresenta detalhes cruciais, incluindo a faixa de elevação, densidade e espaçamento médio dos pontos, data de coleta e as classificações de pontos existentes. Esse resumo oferece um panorama imediato de como os dados foram capturados e o que eles contêm.
Com esse contexto em mãos, você pode avançar para etapas de melhoria direcionadas para corrigir lacunas, refinar classificações e fortalecer a confiabilidade geral da nuvem de pontos.
O processo de melhoria da exatidão e qualidade do Lidar divide-se em duas categorias gerais: edição e filtragem. A edição geralmente envolve a atualização das características dos pontos, enquanto a filtragem significa a remoção de pontos desnecessários ou considerados errôneos. Frequentemente, esses dois procedimentos são aplicados em conjunto.
Editando Nuvens de Pontos
Um dos passos mais comuns ao trabalhar com dados de nuvem de pontos é atribuir ou atualizar os valores de classificação para representar o tipo de superfície. As classes comuns incluem solo, edificações e vegetação, entre muitas outras. Em alguns conjuntos de dados — particularmente aqueles gerados por fotogrametria — é comum que todos os pontos comecem como "não classificados" (unclassified), tornando necessário aplicar classes significativas antes que qualquer análise estruturada possa ser realizada.
Classificação Manual
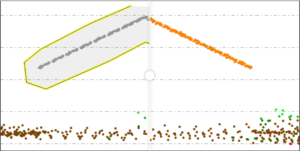
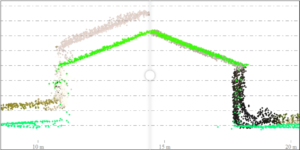
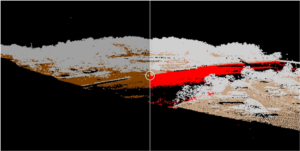
No Global Mapper Pro, as classificações podem ser atualizadas manualmente selecionando os pontos a serem modificados e aplicando a classe desejada por meio dos botões de classificação pré-configurados na barra de ferramentas. Embora este método não seja eficiente para reclassificações em larga escala, ele é ideal para retoques ou edições rápidas em pequenos grupos de pontos, especialmente ao trabalhar na visualização de Perfil de Caminho (Path Profile — vista de seção transversal).

Pontos como estes, que representam o telhado de uma edificação, podem ser selecionados e reclassificados manualmente na visualização de Perfil de Caminho (Path Profile).
Classificação Automática
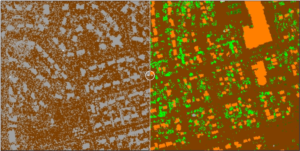
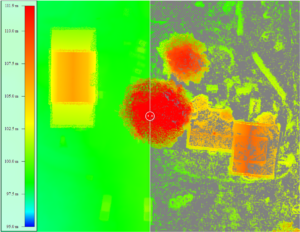
Um fluxo de trabalho mais eficiente é tirar proveito das ferramentas de classificação automática, que analisam o Lidar com algoritmos para detectar pontos que representam o solo, vegetação alta ou árvores, edificações, cabos utilitários suspensos e postes de energia. Outros objetos podem ser isolados para classificação manual utilizando a ferramenta de Segmentação (Segmentation). Esses pontos reclassificados podem, posteriormente, ser usados para a criação de MDTs ou extração de feições. Uma vez que a nuvem de pontos foi classificada, torna-se fácil realizar análises adicionais, como a criação de grades de elevação ou a extração de árvores como feições vetoriais.
O Conjunto de Ferramentas de Classificação Automática analisa nuvens de pontos para identificar elementos como solo, vegetação, edificações, linhas de transmissão suspensas e postes de energia. Objetos adicionais podem ser isolados para revisão manual por meio da ferramenta de Segmentação. Uma vez reclassificados, esses pontos servem de base para tarefas posteriores (downstream), como a construção de um modelo de superfície ou a extração de ativos, como árvores, na forma de camadas de feições.
Classificação Customizada (ou Classificação Personalizada)
Além dos modelos integrados, a ferramenta de Classificação de Nuvem de Pontos Customizada (Custom Point Cloud Classification tool) permite que os usuários definam suas próprias classes e treinem o Global Mapper Pro para reconhecê-las. Após o usuário fornecer pontos de amostra que representem uma feição consistente, o software analisa seus atributos e geometria para gerar uma "assinatura de classificação". Essa assinatura torna-se a base para um modelo customizado, treinado pelo próprio usuário.
Editando os Valores X, Y e Z
Outro aspecto da qualidade do Lidar que pode ser refinado é a exatidão posicional. Quando um conjunto de dados não se alinha perfeitamente com uma camada de referência ou outra nuvem de pontos, o Global Mapper Pro oferece diversas ferramentas para corrigir sua posição 3D:
Cada um desses métodos atualiza as coordenadas ou as elevações dos pontos para refletir as correções aplicadas. Para orientações adicionais sobre como melhorar a exatidão posicional de nuvens de pontos, consulte este artigo.

Filtragem de Dados de Nuvem de Pontos
Quase sem exceção, uma nuvem de pontos precisará ser filtrada antes de iniciar qualquer fluxo de trabalho de análise, geração de superfície ou extração de feições. O processo de filtragem pode ser baseado na extensão geográfica dos dados ou, mais comumente, em seus atributos ou características inerentes.
Ferramenta de Exibição do Lidar (ou Ferramenta de Visualização do Lidar)
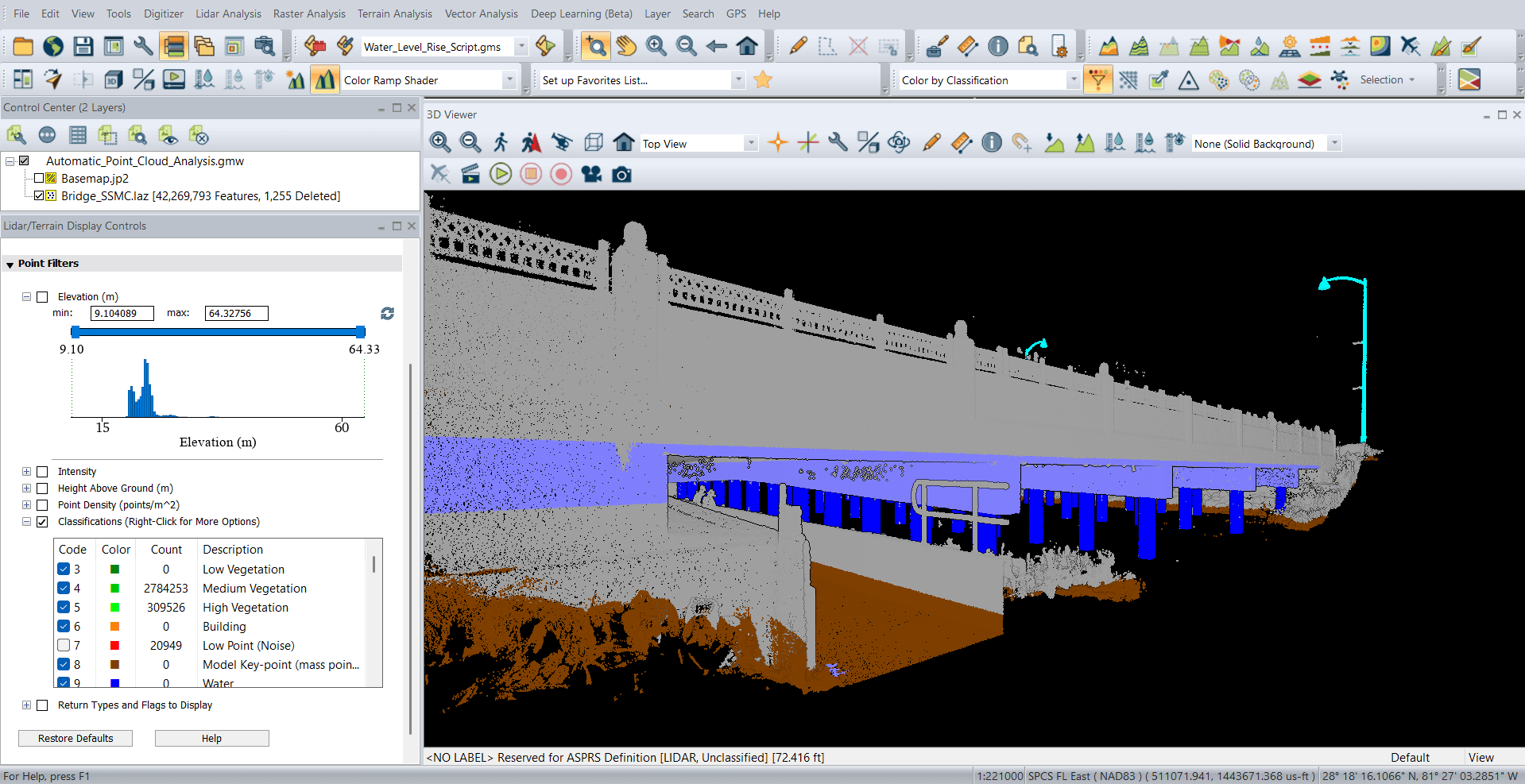
Dentro dos controles de Exibição de Lidar/Terreno (Lidar/Terrain Display), recentemente reformulados na versão 26.2, há uma interface de Filtros de Pontos (Point Filters) que torna rápido e fácil visualizar pontos que atendam a critérios específicos, seja a nuvem de pontos proveniente de Lidar ou de fotogrametria. Os atributos filtráveis são preenchidos e calculados automaticamente com base nos metadados dos pontos, indo além das limitações de atributos nativos, como elevação, intensidade ou valores RGB. Utilizando controles deslizantes de histograma, os usuários podem ajustar rapidamente quais pontos ficam visíveis em tempo real, obtendo controle preciso sobre seu conjunto de dados. Os pontos filtrados são ocultados da visualização, mas não excluídos, e podem ser restaurados a qualquer momento.

Filtragem Geográfica
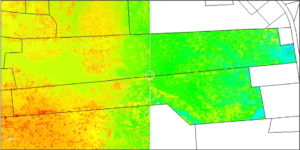
Como ocorre com qualquer dado vetorial, uma nuvem de pontos pode ser recortada (cropped) para a extensão de um polígono pré-selecionado, oferecendo um método simples para remover redundâncias em quaisquer processos subsequentes. Esta é, talvez, a mais útil das opções de filtragem disponíveis durante o processo de importação de dados, mas também pode ser aplicada após os dados terem sido carregados.

As nuvens de pontos podem ser facilmente filtradas ou recortadas para a extensão da área de um projeto.
A proximidade entre os pontos também pode ser usada como base para a filtragem. A ferramenta de adelgaçamento (thinning tool) do Global Mapper Pro remove pontos com base em um requisito definido de densidade ou espaçamento, mantendo apenas o ponto com a elevação máxima, mínima ou média dentro de uma vizinhança imediata. Isso é especialmente útil ao trabalhar com nuvens de pontos de alta densidade criadas por fotogrametria.
Da mesma forma, a ferramenta de Pontos Chave do Modelo (Model Key Point tool) também realiza o adelgaçamento de uma nuvem de pontos, mas trabalha para dizimar a nuvem até a menor quantidade de pontos necessária para representar as feições contidas nos dados.

Remoção de Ruído
Pontos de ruído são definidos como aqueles que estão fora da faixa de elevação normal dentro de uma área local especificada. Os pontos de ruído podem estar presentes devido a problemas no processo de coleta de dados, anomalias físicas na área alvo — como pássaros voando abaixo da aeronave — ou por inúmeros outros motivos. A ferramenta de identificação de ruído do Global Mapper Pro pode reclassificar os pontos de ruído ou removê-los e excluí-los imediatamente, com base em um conjunto prescrito de parâmetros e limites de elevação.

Filtragem por Classificação
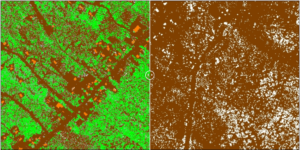
O primeiro passo no processo de transformar uma nuvem de pontos em um DTM raster é, por necessidade, a eliminação de pontos que não estão classificados como solo. A retenção de pontos de "não-solo" ou não classificados criará uma superfície que inclui feições acima do solo e não refletirá a morfologia do terreno (bare-earth) da área alvo. A filtragem, neste contexto, é um processo simples de seleção de classes, que pode ser aplicado tanto na exibição dos pontos na tela quanto durante o processo de geração da grade (gridding) ou criação da superfície. Em ambos os casos, as elevações atribuídas aos pixels na camada raster resultante serão derivadas do subconjunto selecionado da nuvem de pontos.

Exportação de Nuvem de Pontos
Embora o Global Mapper Pro ofereça uma ampla gama de ferramentas de edição e filtragem, é importante observar que os procedimentos de melhoria descritos neste artigo não são salvos automaticamente nos arquivos originais ou nas camadas carregadas. Para salvar os resultados de qualquer um dos procedimentos de melhoria da nuvem de pontos em um arquivo, os dados devem ser exportados no formato de nuvem de pontos adequado. A nova camada herdará todas as características dos pontos modificados e será limitada àqueles pontos que foram retidos após a filtragem ou exclusão dos pontos desnecessários.
As poderosas ferramentas de análise, extração e geração de superfícies do Global Mapper Pro naturalmente recebem a maior parte da atenção e elogios dos profissionais geoespaciais. No entanto, é fundamental reconhecer adicionalmente o papel vital que as ferramentas de edição e filtragem do Pro desempenham nesses procedimentos. Quanto melhor for a qualidade da matéria-prima, melhor será o produto final.
Contato
Entre em contato conosco para receber uma proposta técnica e comercial adaptada às suas necessidades.
Atendimento em toda a América Latina!
E-mail: laurent.engesat@gmail.com ou engesat@engesat.com.br
Cel: 041 9134 0990 (também whatsapp)

E ai, gostou desta publicação? Deixe um comentário para acrescentar conteúdo ou para iniciarmos uma discussão sobre o tema.
Curta e compartilhe com seus clientes e colegas de profissão!
Esta publicação foi escrita por Laurent Martin, formado em Agronomia e com Mestrado em Sensoriamento Remoto Aplicado no Reino Unido, é responsável pela direção da EngeSat.